“INDEMIND:随着市场需求不断释放,机器人的出货量正持续增长,然而从概念到实地应用,机器人的落地过程却并不顺利,这其中,现场部署环节更是一直困扰厂商和终端用户的共同难题。”
现场部署作为机器人场景应用的最终环节,从直观来看,似乎并不存在繁复冗杂的技术细节,无非就是现场调试,不需要太多时间,然而事实真是如此吗?
以清洁机器人为例:
以上便是市面上绝大多数机器人部署的标准流程,即是「基于机器人建图,基于管理工具进行业务管理」的部署方案,由于流程复杂,通常需要较长的部署时间,从技术角度来看,这种方案有着多种缺陷:
在实际现场部署过程中,由于部署效率低下,无论对于厂商还是终端用户都会导致投入成本和时间成本的增加。因此,随着市场需求不断释放,解决部署效率问题已成为切实任务。
该如何解决这一难题?部署服务机器人能否像使用家用扫地机器人一样简单快捷呢?
事实上,这一想法已经被一家公司实现。依托于对机器人全栈技术的多年自研经验,INDEMIND开发了一套全新的机器人部署方案。
不同于市面上「基于机器人建图,基于管理工具进行业务管理」的方案,INDEMIND方案是「基于机器人,直接实现建图及业务管理」的方式,配套自主搭建的仿真验证平台和部署流程及管理工具,能够最大程度减少技术人员的参与,实现用户自主部署。
在应用上,INDEMIND机器人部署方案拥有5大技术特点:
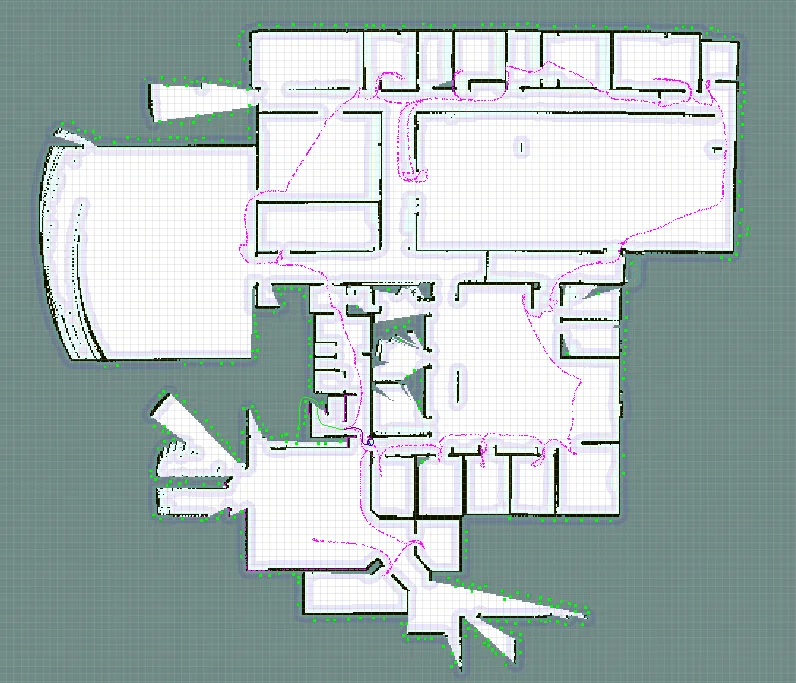
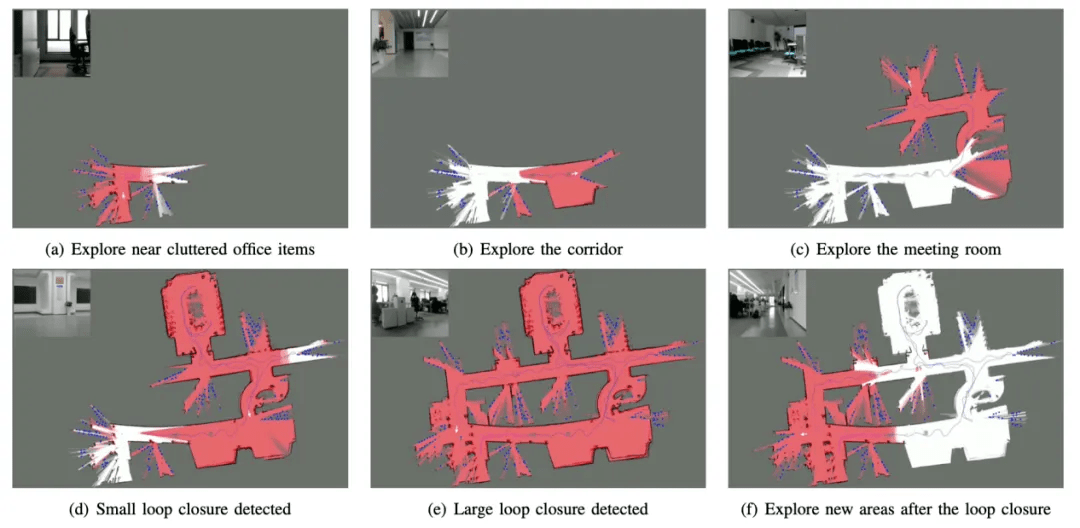
为了简化部署流程环节,INDEMIND基于行业领先的双目立体视觉技术,结合设备端的嵌入式深度学习和VSLAM算法,可快速输出个体性物体语义和区域性场景语义,能够实现实时构建3D语义地图和高精度定位,在对电梯、闸机、狭窄过道等一些目标点进行标注时,基于物体识别,系统可实时辅助标注,降低操作难度,无需工程师参与,普通用户即可自主执行。
INDEMIND开发了一套简单化、便捷化操作的可视化部署工具,可以让用户基于机器+机器端配置的LCD屏,实现自主化操作,简单方便。
基于双目、Lidar等多个传感器的融合方式,同时结合深度学习,INDEMIND开发了一套决策引擎技术,大幅提升安全决策水平,实现对自动扶梯、玻璃、跌落等场景的安全管理。
INDEMIND专门搭建了云端智能管控平台,通过部署在云端的强大算力,为机器人提供实时的全状态管控智能服务,无论家用机器人还是商用机器人,不增加前端硬件成本的前提下大幅提高任务处理和问题应对能力。
INDEMIND拥有一套自己的机器人部署仿真平台,机器人在提供给用户之前,会支持用户基于该仿真平台进行部署仿真,以实现在交付前即验证完全满足用户使用需求,大大降低部署难度,提高部署效率。
通过逐一解决现场部署中的过程化难题,INDEMIND机器人部署方案不只是部署效率的提升,同时也是新老技术的变更迭代,在市场规模不断扩张,出货量不断增长的背景下,新方案的应用,无论对于厂商还是终端用户,又或是对于机器人行业的整体发展无疑都有着实际价值。