随着社会经济发展水平和人们消费观念的转变,更具科技属性的智能规划型扫地机器人成为最受费者青睐的智能家居产品。据数据显示,智能规划扫地机器人市场占比从17年的10%提升到18年的59%,其中激光导航占76%,视觉导航系统占24%。而随着视觉导航系统在iRobot、戴森等扫地机器人头部阵营不断发酵,关于视觉导航单目、双目的技术问题,也得到了扫地机器人厂商的广泛关注。
众所周知,扫地机器人视觉导航系统是通过连续不断地对机器周围环境拍摄记录,并根据特征点或标志物进行房屋建图,实现导航定位或路线规划,单目双目方案,都是如此。不同的是,单目摄像头在单帧图像中,无法确定距离物体的真实距离,仅能通过相机的运动形成视差,测量物体的相对深度。也就是说,单目视觉导航方案无法实际测绘出一个物体的真实大小。这个物体可能是个很小却很近的物体,也可能是一个很大却很远的东西。并且,在单目SLAM估计的轨迹和地图上,与真实的轨迹和地图相差一个重要因素——尺度,即便结合里程计、IMU进行组合导航,依然无法达到双目的精度水平。

无法确定真实尺度,这也意味着以测距为基础的三维立体解算应用在单目传感器上无法得到有力支持,影响搭载单目视觉导航系统扫地机的智能避障,语义地图等功能。另一方面,单目SLAM更易受到运动过程中的噪声影响,稳定性较双目SLAM低,对复杂环境的适应能力较弱,无法长时间保持定位、规划的精准性。这也是为什么单目成本更低,市场却对其响应平平的原因。
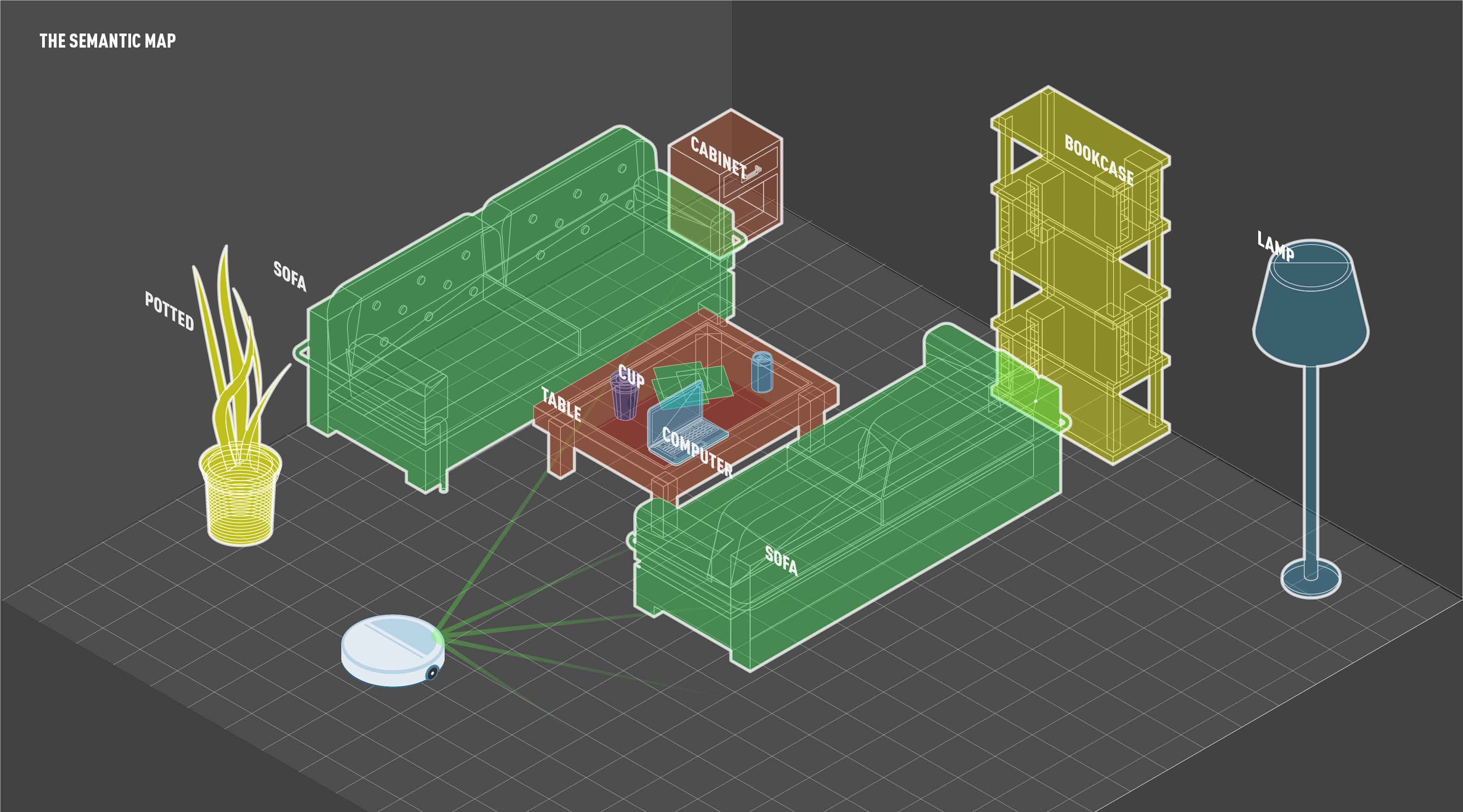
双目在硬件结构上更接近人类的双眼,通过左右目图像的视差来确定距离,也就是立体视觉。从工作原理上来说,双目是将左右目拍摄的2D环境图像通过三维立体解算成带有深度信息的三维空间结构,更适合扫地机器人实现精度及稳定性俱佳的导航定位效果。并且,基于三维空间的立体解算,扫地机器人在识别障碍物时,可以解算出障碍物距离,大小以及属性,障碍物识别范围更广,类似多线激光雷达,后续的避障便有了更多操作空间。另一方面,结合语义识别,双目视觉导航扫地机器人可以更好地得到语义地图,理解房屋布局、空间结构,让扫地机器人实现如人物目标跟踪、执行特定语义区域清扫等智能人机交互,甚至担任无人情况下部分家庭安防工作。
当然,双目实现这些功能是有前提条件的,双目视觉导航的一个难点便是相机的同步问题。上文提到,双目是通过左右目图像的视差测距的。因此,理论上左右目摄像头要做到完全一样,这便需要两枚摄像头实现同步。如果两个摄像头拍摄时无法达到完全同步,那么就会造成测距的参照物发生错位,造成不可逆的连锁误差。
为了解决这一问题,国内新锐计算机视觉厂商INDEMIND软硬件优化一齐着手。首先通过硬件同步和高精度标定算法,让摄像头之间、其他传感器之间实现微秒级时间同步,实现硬件端低误差测距。在算法上,搭载自研Vi-SLAM算法,通过构建全局SLAM地图,实现精准稳定的空间定位,进而掌握清扫路径和未清扫区域,自主智能完成“补漏式”清扫。并且,基于全局地图还可实现SLAM丢失后的重定位或开机重定位,提高机器人系统鲁棒性。
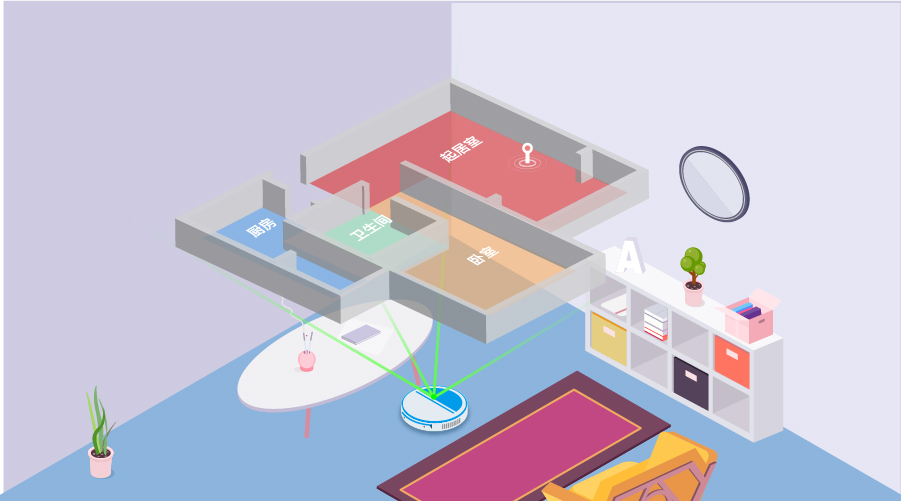
完成扫地机器人清扫这一基本工作之余,结合语义识别建立的语义地图,扫地机器人不仅可以“看”还可“理解”障碍物是什么,进而实现最优路径规划和全局/选择性避障,避免漏扫、误扫。并且,根据语义地图,使扫地机器人与人之间产生更多交互,如语音命令扫地机器人清扫特定区域、人物活动密集区域着重清扫等,更高效的执行家庭清扫任务。
总的来说,双目视觉导航是定位精度更高、系统鲁棒性更强,更加智能的扫地机器人导航方案,能够更好地引领扫地机器人向家庭清洁智能助手转变,随着技术的不断进步,可以预见,双目视觉导航系统将会逐渐成为扫地机器人主流导航定位方案。



