
INDEMIND M1是专为开发者提供的一款硬件,采用“双目摄像头+IMU”多传感器融合架构与微秒级时间同步机制,为视觉SLAM研究提供精准稳定数据源,以满足SLAM研究、导航及避障开发、视觉动作捕捉开发、立体视觉开发等使用需求。

INDEMIND双目惯性模组是业内首款支持200FPS图像获取的双目惯性相机,可在高速机动下精准获取图像及IMU数据,满足开发者高速采集需求,极大降低相应算法追踪难度,并可满足高速SLAM算法(如车载)的定位和建图数据需求

模组运用摄像头+IMU多传感器融合架构,使摄像头与IMU传感器优势互补,实现位姿精度更高、环境适应性更强、动态性能更稳定、成本更低的双目立体视觉硬件方案
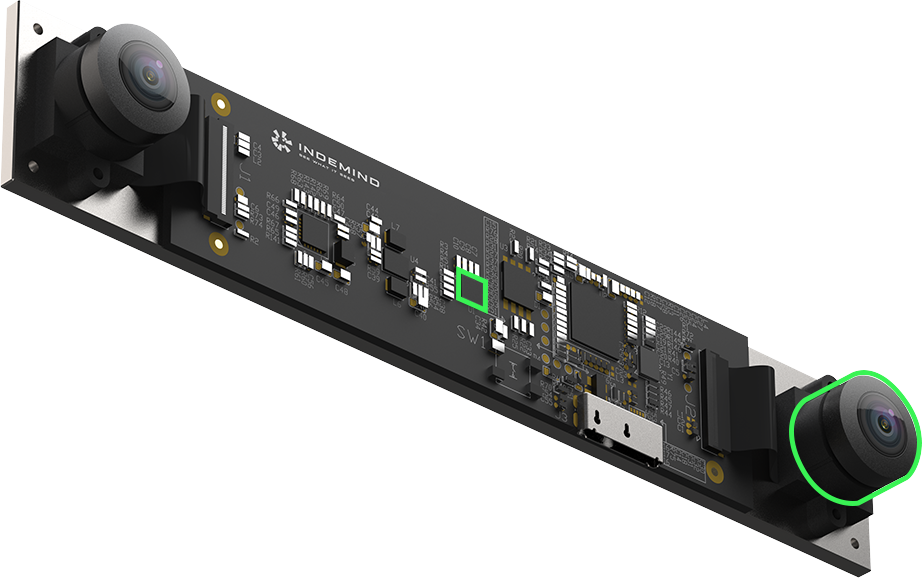
采用全局快门的高清摄像头,可提供水平120°、垂向75°范围内1280×800@25/50/100FPS、640×400@25/50/100/200FPS图像数据,可有效降低运动图像拍摄下的图像畸变,为SLAM算法提供强有力前端数据采集能力
模组内置6轴IMU传感器,最高运行频率1000Hz,可精准测量载体运动特性,高频率刷新载体位姿信息,快速建立对周围环境的三维立体感知
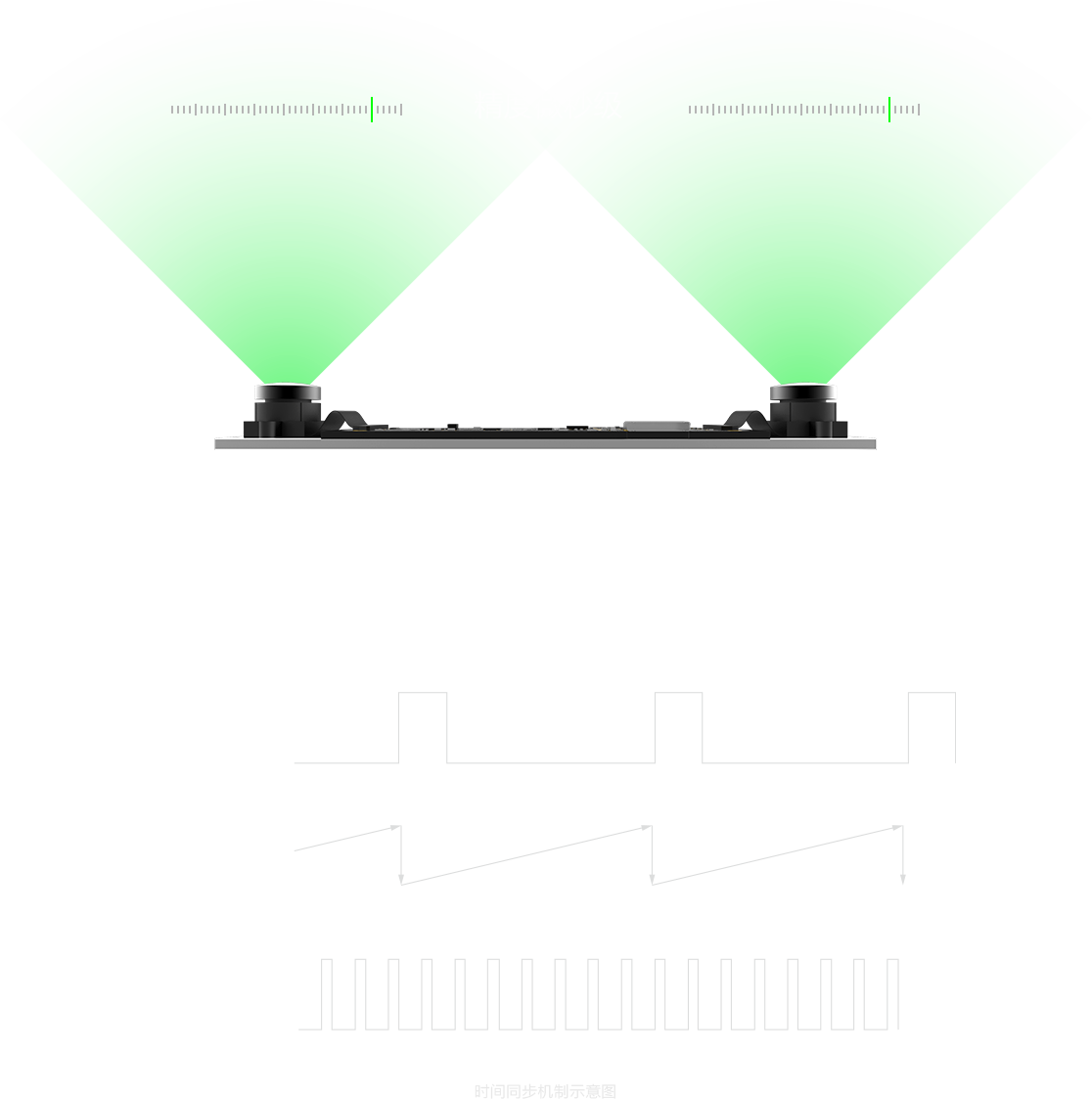
匠心设计的高精度时间同步机制,可将双目摄像头与IMU同步精度提高至微秒级,减少传感器工作误差,进而为SLAM等算法提供精准稳定的数据源
对摄像头与IMU等多传感器进行专业标定,标定精度优于Kalibr等开源标定方法,减少多传感器装配误差,进一步提升数据采集精度及系统稳定性
| 组别 | head(°) | pitch(°) | roll(°) |
|---|---|---|---|
| 1 | -179.5008 | -0.6017 | 0.6507 |
| 2 | -179.3397 | -0.6017 | 0.6507 |
| 3 | -179.1031 | -0.1903 | 0.4534 |
| STD | 0.2000 | 0.2211 | 0.1502 |
| 组别 | head(°) | pitch(°) | roll(°) |
|---|---|---|---|
| 1 | -179.521225 | -0.439943 | 0.622170 |
| 2 | -179.602241 | -0.463838 | 0.598827 |
| 3 | -179.780491 | -0.662679 | 0.404572 |
| STD | 0.1326 | 0.1223 | 0.1195 |
0.1m-10m
全局快门
D:140° H:120° V:75°
1280×800 | 640×400
25FPS | 50FPS | 100FPS | 200FPS
120mm
1000Hz
25Hz
200Hz
Windows、Linux、ROS
IMU标定、摄像头标定、IMU摄像头间标定
SDK







产品规格
双目视觉惯性模组
PCBA板:95mmx25mm;总体长宽:140mmx25mm
【25FPS】【50FPS】【100FPS】【200FPS】
【1280×800】【640×400】
Base on CPU Up to 640×400@25FPS
3.0 x 3.0μm(1280×800)
5ms
120.0 mm
Replacable Standard M12
D:140° H:120° V:75°
2.09mm
无
6 Axis IMU
Monochrome(单色)
Global shutter
1.05W @ 5V DC from USB
微秒级
1000Hz
Raw data
USB 3.0
40g
YES
0.1-10m
软件
Windows10、Linux、ROS
SDK开发及文档
IMU标定、摄像头标定、IMU/摄像头外参标定
CPU、USB3.0接口
环境
-10°C~60°C
-40°C~120°C
0% to 90% NON-CONDENSING
包装内容
1× 双目视觉惯性模组 1× Micro USB 3.0数据线 产品用户手册 便携包
保修
自购买之日起一年内,双目视觉惯性模组出现任何非人为损坏导致产品无法正常使用的硬件故障,经由INDEMIND售后服务中心检测后,可提供免费维修服务




任何产品相关的技术问题均可和在线客服进行交流,我们将尽快为您提供帮助
QQ客服
3457489099
微信助手
微信搜索:INDEMIND
技术服务邮箱
support@indemind.cn



