一:什么是多传感器融合?
多传感器融合(Multi-sensor Fusion, MSF)是一种利用计算机技术,将来自多个传感器或多个信息源的数据和信息以一定的准则进行自动分析和综合,以完成所需的决策和估计而进行的信息处理过程。这种技术可以将不同类型、不同精度、不同可靠性、不同空间分辨率的传感器数据进行融合,以得到更全面、更准确、更可靠的环境感知结果。
多传感器融合的基本原理是充分利用各种传感器的优势,通过一定的算法将它们的数据进行融合,从而得到更全面、更准确的信息。这种技术可以应用于各种领域,如自动驾驶、机器人、智能家居等。在这些领域中,多传感器融合可以帮助系统更准确地感知和理解周围环境,从而做出更智能、更安全的决策。
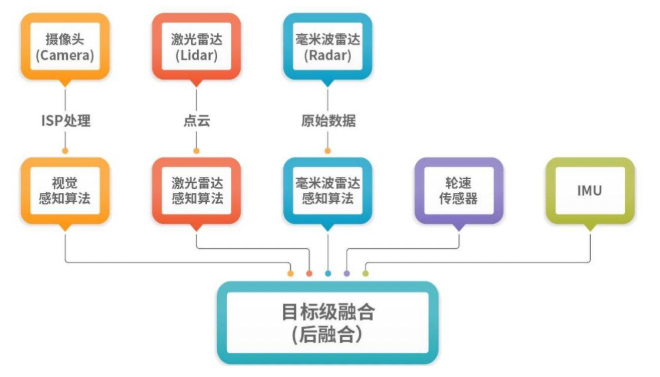
多传感器融合的分类包括前端融合算法和后端融合算法。前端融合算法直接对原始传感器数据进行融合处理,融合好的数据就好比是一个Super传感器,它可以看到红外线,可以看到图像,还可以看到LiDAR的三维信息,在这个Super传感器上面再进行特征提取和目标识别等操作。而后端融合算法的融合方式相对松散,各传感器在融合之前保持相对独立,如激光雷达有激光雷达的感知,摄像头有摄像头的感知等,最后对已经进行过初步处理的传感器数据进行融合。
多传感器融合的优点包括提高精度和可靠性、增强环境适应能力、降低成本和风险以及促进智能化发展。然而,这种技术也面临一些挑战,如数据同步、数据融合算法的设计和优化、计算资源的需求等。因此,虽然多传感器融合有很大的发展潜力,但还需克服一些技术和工程上的挑战。
二:多传感器融合的应用价值
多传感器融合技术近年来备受关注,其将不同传感器的数据进行融合,以提高感知的精度和可靠性。对于未来,多传感器融合技术有很大的发展潜力,尤其在自动驾驶、机器人等领域,这种技术的重要性日益凸显。
以机器人为例,多传感器融合技术的作用有多个方面:
提高精度和可靠性:多传感器融合可以利用不同传感器的优势互补,从而提高感知的精度和可靠性。例如,激光雷达可以提供精确的距离信息,而摄像头可以提供丰富的纹理和颜色信息,将这两种传感器的数据进行融合,可以得到更完整、更准确的环境信息,从而更好地进行路径规划和避障,实现自主导航和自主避障。
增强环境适应能力:不同的传感器在不同的环境和条件下可能有不同的表现。多传感器融合可以利用各种传感器的优点,提高系统在不同环境下的适应能力。例如,在光线条件不佳的情况下,视觉传感器的性能可能受到影响,但激光雷达可能仍能正常工作。
降低成本和风险:使用多种传感器可以增加系统的冗余性,从而在某些传感器失效的情况下,系统仍能继续工作。这不仅可以提高系统的可靠性,还可以降低因为单一传感器失效导致的风险。
促进智能化发展:多传感器融合可以促进系统的智能化发展。通过对不同传感器的数据进行深度融合和处理,系统可以进行更复杂的决策和判断,从而实现更高级的功能。
推荐阅读:什么是视觉感知技术?市场应用是怎样的?
INDEMIND是一家拥有自研机器人全栈AI技术的机器人AI技术供应商,立足于机器人产业链最上游,为整个机器人行业提供通用的、可靠的、低成本的机器人AI技术。如有:视觉导航、扫地机器人导航、商用机器人底盘和双目视觉等AI技术需要,请拨打010-5289 4598




