历经随机式、规划式、全局导航式三代技术发展,如今的扫地机器人在很多方面都取得了突破性进展,已经成为家庭中必不可少的清洁帮手。但智能扫地机之所以被称为“智能产品”,除了具备精准导航规划功能外,智能化避障也是一个重要方面。
目前而言,无论是激光导航方案、激光雷达+单目视觉或ToF融合方案,其主要传感器多位于扫地机器人顶部,可视角度在垂直方向都很小,无法实现大范围障碍物检测。对于低于或略高于(高于机身,但会碰到激光雷达传感器)机身的障碍物,例如柜底边缘、近地处的电线等,扫地机器人都无能为力。因此,扫地机被柜底卡住、被线体缠绕等问题时有发生。另外,多数机型对于近处的障碍物采用的是试探性碰撞的方式,此模式下房间内易碎物品的安全性难以保证。
面对这样的行业痛点,2020年3月2日,国内行业领先的立体视觉方案提供商INDEMIND深度结合用户需求,发布了解决扫地机器人避障痛点的双目避障模组。

INDEMIND双目避障模组充分发挥了立体视觉技术深度解算及大视场角特性,可在0.05-1.5米范围内实现深度误差<1%的深度解算,配合水平>60°,垂向>30°的视场角,可有效覆盖传统扫地机避障方案无法覆盖的区域,实现全范围障碍物检测、识别,帮助扫地机器人精准获取门槛、柜底等障碍物信息,提升扫地机器人感知能力和避障范围,从根源上避免了扫地机器人卡机、误触等问题,减少故障率。
同时,模组标配IR主动红外探测器,可有效增强白墙和无纹理物体的识别精度,进一步提升扫地机避障性能。
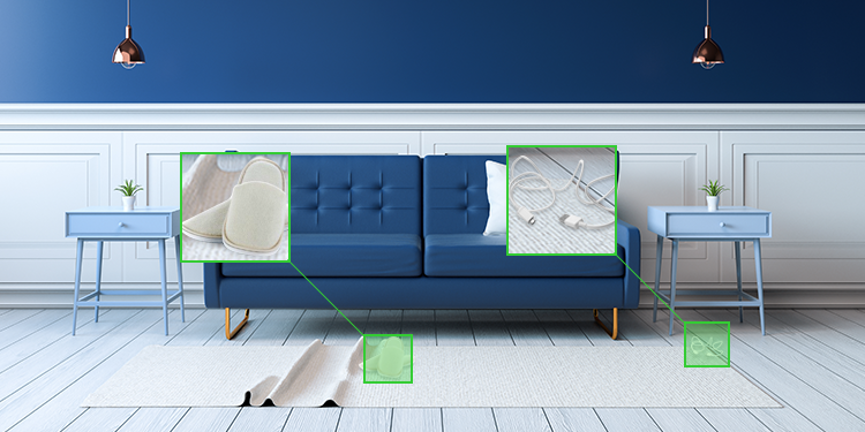
此外,INDEMIND为双目避障模组内置了专为家居场景研发训练的物体识别卷积神经网络模型。目前,已支持识别百余种常见家用物体品类,识别精度<2cm,可快速、精准地识别数据线、电线、鞋子、宠物粪便等障碍物,从而执行主动识别避障,避免误扫、误触。
INDEMIND联合创始人姜文表示:通过立体视觉技术结合AI物体识别算法,双目避障模组不仅填补了行业市场空白,更是革新了扫地机长久以来的避障逻辑,使扫地机避障更智能,满足日益提升的消费需求。
INDEMIND作为国内领先的立体视觉方案提供商,倡导“共创、共赢”的合作理念,积极推动产品、技术、合作方式等全方位的创新。“我们希望通过INDEMIND的产品与技术,多方位、快速的为扫地机器人集成AI立体视觉避障功能,助力扫地机进入识物避障时代。”INDEMIND联合创始人姜文表示。
为此,INDEMIND为双目避障模组提供了两种商务合作方式:
一方面,INDEMIND提供双目避障模组软硬件一体化支持,提供双目避障模组硬件以及包含深度检测、AI物体识别等算法在内的多平台SDK,并提供联调过程中线上、线下技术支持,辅助用户直接集成,助力产品快速落地。
另一方面,INDEMIND提供软件算法授权服务,帮助用户依托其自有双目视觉硬件,快速为扫地机器人产品部署AI立体视觉避障功能,缩短研发周期,降低研发成本。
目前,扫地机器人产业已经来到新一代技术变革的前夜。作为行业创新的积极推动者,INDEMIND将持续贯彻“坚持创新、专业、智能”的服务理念,在AI立体视觉领域深耕细作,驱动扫地机器人核心技术的创新发展。




