获取场景深度信息是计算机视觉系统中的重要作用之一,通过深度图,计算机视觉系统可获取场景内各点距双目相机的位置,提供图像测距、深度图像分割、三维目标识别等功能,进而可对真实场景进行三维建模;有了鲁棒的深度图,双目相机还可实现部分RGBD相机功能,如运行RGBD SLAM或实现体感捕捉。
作为一款多场景适用的双目惯性相机,INDEMIND双目视觉惯性模组可输出高精度深度图像。今天,M哥就为大家展示一下INDEMIND双目惯性模组的深度图Demo,一起来看一下效果吧。
效果
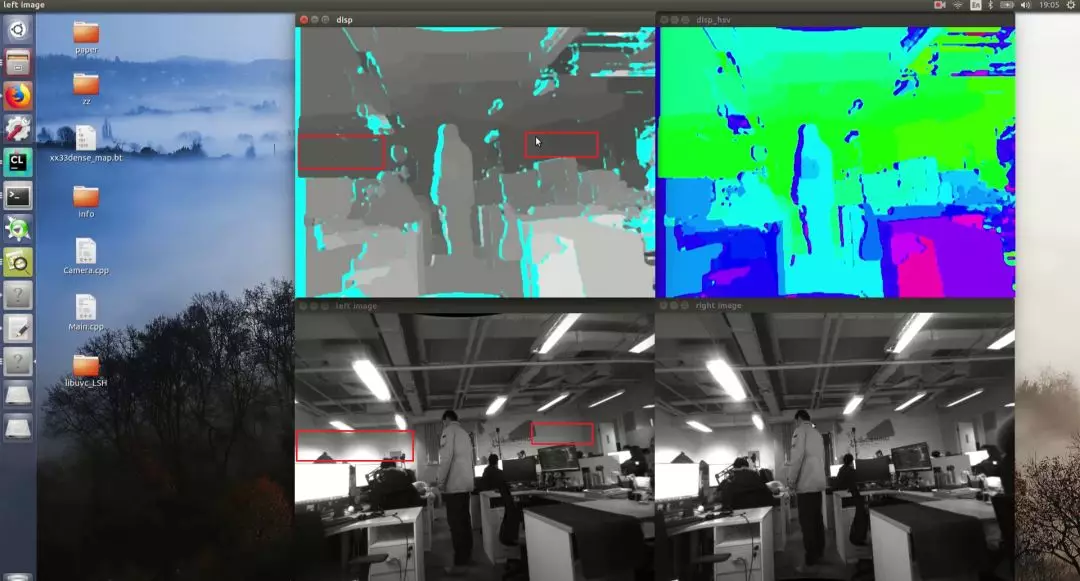
如图所示,视频中弱纹理区域识别效果较好,未出现无法识别、或识别误差较大的黑斑;图像内物体边缘与深度图边缘贴合。
深度误差分析
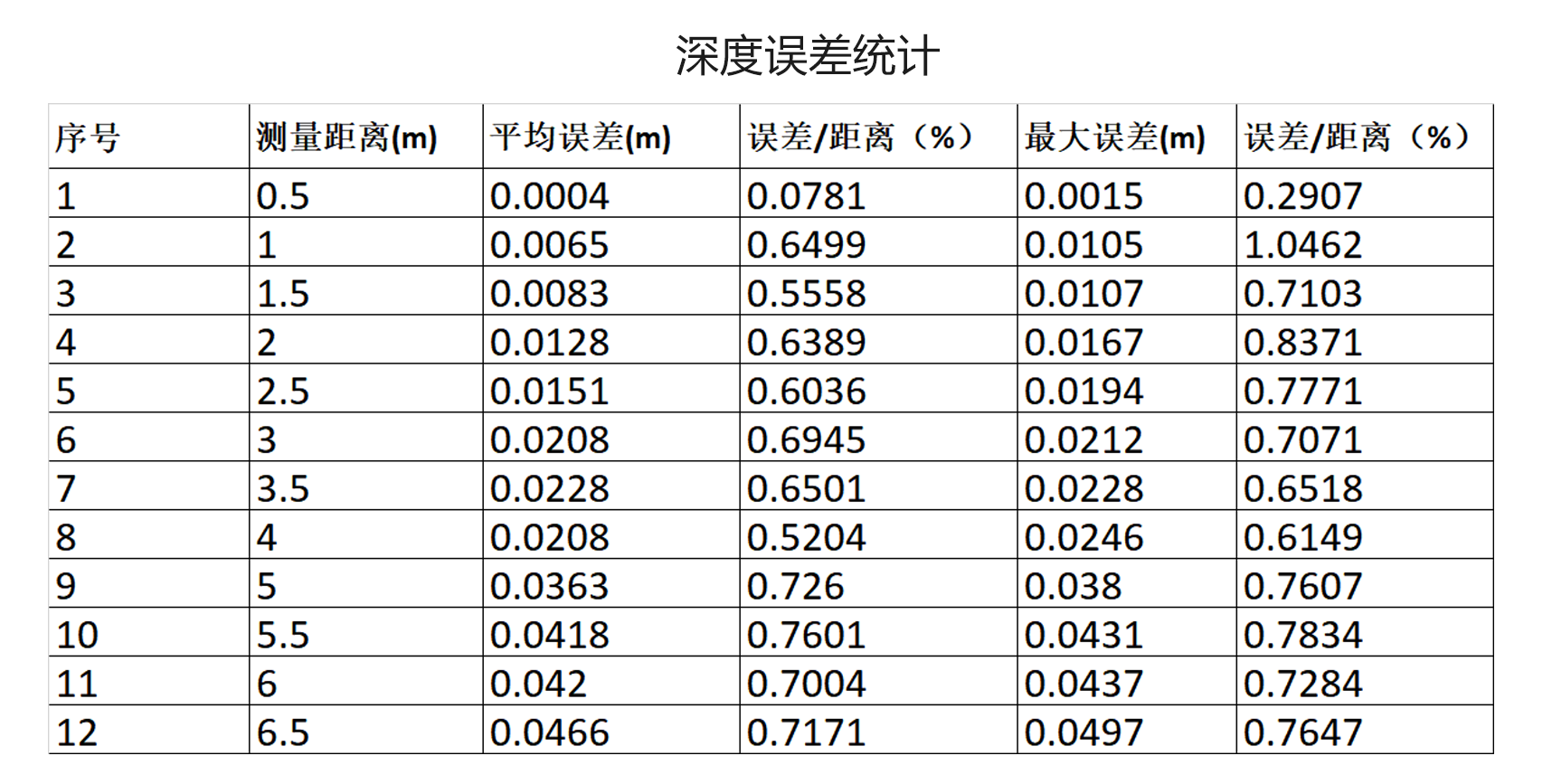
为验证深度精度,我们测试了不同距离下误差,数据如下表所示:
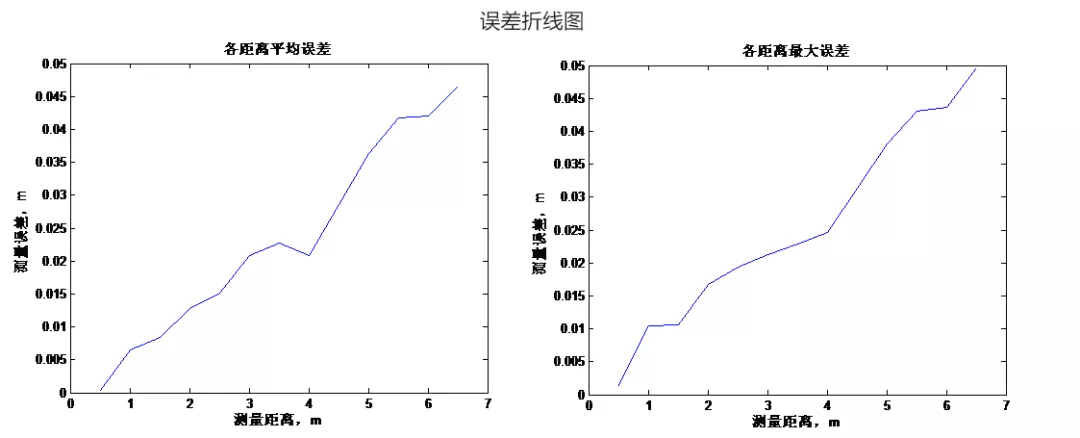
上图对应的误差曲线如下: