纯视觉方案的缺陷和诱惑。
“不靠谱”的视觉
无论是自动驾驶,还是机器人导航,纯视觉方案都一直倍受质疑。不可置否,视觉是公认的未来主要技术方向,但现实中的“稚嫩”表现让这一可期未来始终可望不可即。
视角拉到自动驾驶领域,作为纯视觉方案的急先锋,特斯拉的纯视觉之路走得并不顺利。去年6月,美国国家公路交通安全管理局(NHTSA)发布了一份监管文件,文件指出消费者对于“幽灵刹车”的投诉量激增,从2月份的354起增长至单月758起。大量的投诉也引起了人们对视觉的质疑和担忧。
虽然纯视觉方案有着更高经济性、可扩展性的独特优势,但一般认为纯视觉方案的精准度和鲁棒性还达不到激光雷达方案的水平,由于采用纯摄像头作为数据输入,导致其是用二维图像生成三维空间,更难准确掌握障碍物的三维位置信息,难以自动驾驶的安全要求。
与此同时,思维的惯性,也让人们对机器人视觉导航有着同样质疑。不幸的是,机器人视觉导航方案的实际表现也同样不理想。对目前应用视觉导航方案最多的扫地机器人品类分析来看,虽然视觉也是市面上的主流导航方案之一,但其应用产品大多为中低端产品,视觉方案在光线环境适应、导航精度、算力要求等方面都有着或多或少的缺陷。
事实上,自动驾驶和机器人导航虽是孪生子,却不能一概而论。相同的“不靠谱”,本质却不同。由于应用场景的不同,汽车和机器人对于精准度和鲁棒性的要求是不同的,对于家用扫地机器人而言,由于不需要高速运动状态下作业,实现媲美激光雷达方案的纯视觉方案并非幻想,在技术上也没有自动驾驶级别的瓶颈。
不做配角,视觉也能独挑大梁
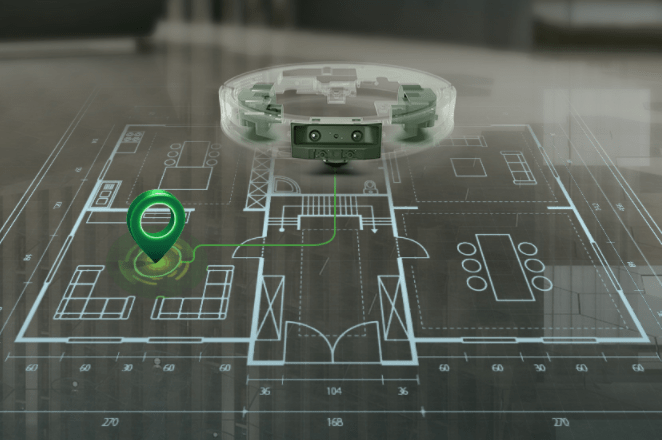
INDEMIND「家用机器人AI Kit」视觉导航方案,为业内带来了新的答案。

「家用机器人AI Kit」以INDEMIND自研的INDEMIND OS Lite家用机器人AGI系统为核心,搭配面向家用小型机器人专门研发的一体化立体视觉模组,可实现家用机器人导航定位、智能避障、路径规划、决策交互等核心功能,是包含软硬件的ALL IN ONE解决方案。
作为一款纯视觉导航方案,「家用机器人AI Kit」在光线环境适应、导航精度、算力要求、智能化等方面都有了根本性进步。
为了应对光线适应问题,INDEMIND开发了一套系统化环境补光策略,包含主动式环境补光配置和光照变化条件下的建图策略,在实际表现中,面对强光直射、无光源、昏暗等特殊光照环境均能无差异工作,满足全天候作业要求。在导航精度方面,基于INDEMIND自研的高精度VSLAM算法,可精准快速地获取位置位姿信息,目前导航精度已实现绝对定位精度<1%,姿态精度<1°,足以媲美激光雷达。其次,为了有效降低算力要求,INDEMIND在算法上采用增量优化的方式,分段处理,并在区段间建立先验信息,有效降低了平台的计算压力,同时应用硬件加速技术,在硬件上,对于视觉处理采用neon加速、GPU加速、DSP加速等方式,进一步提升计算性能,降低算力要求,在实际表现中,已能够在几美金的计算平台上稳定运行整套VSLAM算法。
在更加重要的智能化方面,「家用机器人AI Kit」也进行了全面提升,支持智能识别、智能地图、智能避障、智能交互等多种关键功能。
基于立体视觉技术和轻量化深度学习模型,机器人可以识别物体、人、动物及空间语义,根据扫地机器人家庭应用场景需求,目前定义识别鞋、插线板等10类物体,且识别类别可根据特定需求调整和训练。智能地图不仅支持构建三维语义地图,还支持全时段、全光线环境重定位及智能禁区功能。
 物体识别效果示意图
物体识别效果示意图
为了进一步提升机器人的“智商”,INDEMIND还专门开发了决策交互引擎,基于高精度三维建图能使机器人在语义层次上理解环境信息,模仿人类大脑对环境理解的方式,并进行策略处理。因此,结合决策交互引擎,在避障上,机器人可做出类人规避动作的精细化操作,能够让机器人有策略的实现智能避障(如根据障碍物不同做出不同规避距离);在交互上,可通过语音、手势、动作等自然语言指令,命令机器人进行安全、搜寻、跟随、自主寻路、定向清扫等多种智能逻辑。以定向清扫为例,发布语音命令:“清扫一下厨房”可被识别为针对地图上识别到的厨房区域进行一次规划清扫。
值得提到的是,在成本表现上,「家用机器人AI Kit」只有激光雷达融合方案的1/3,却实现了同等水平的技术效果。
目前,INDEMIND已和国内多家扫地机器人厂商达成合作。相信未来随着纯视觉导航产品的落地,质疑声也将随之消失。




